-
15:44
Secrets of the Deep! The Ocean's Greatest Mysteries! | COLOSSAL QUESTIONS
-
03:11

Can You Run Faster Than a Dog?
-
13:59

There Are Thousands of Alien Empires in The Milky Way
-

2024 Total Solar Eclipse: Through the Eyes of NASA (Official Broadcast)
-
05:54
What is earwax and should you get rid of it? - Henry C. Ou
-
05:17

Why was the Rosetta Stone so important? - Franziska Naether
-
05:20
One of the worlds oldest condiments - Dan Kwartler
-
08:16

If Your Body Can Do That, You're One in a Million
-
12:59

How to Draw Pichu | Pokemon
-
13:40

The Paradox of an Infinite Universe
-
08:27

OpenAI Sora: The Age Of AI Is Here!
-
05:49

Why can't you put metal in a microwave? - Aaron Slepkov
-
18:20

Questions You Never Thought to Ask! | COLOSSAL QUESTIONS
-
04:53
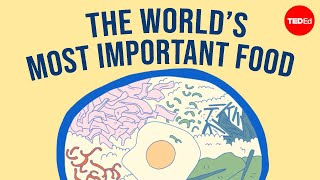
Why is rice so popular? - Carolyn Beans
-
22:17

GROSS Things That Can Happen to Your Body! (If You Don't Take Care of it) | COLOSSAL QU...
-
22:45

What if the Sun Exploded + More OUT OF THIS WORLD Questions! | COLOSSAL QUESTIONS
-
06:40

Why Does Peppermint Taste So Cold? | SciShow Kids
-
12:31

The SMALLEST to the LARGEST Thing in The Universe The Ultimate Size Comparison
-
09:09

Your Tattoo is INSIDE Your Immune System. Literally
-
03:55

How Do We Heal? | COLOSSAL QUESTIONS
-
05:37

The largest river on Earth is actually in the sky - Iseult Gillespie
-
13:41

The 5 Most Commonly Asked Questions About Sports | COLOSSAL QUESTIONS
-
18:25
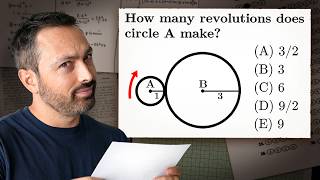
The SAT Question Everyone Got Wrong
-
06:23
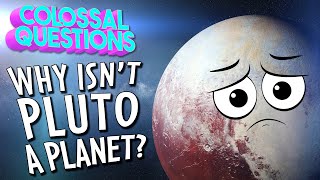
DEMOTED?! Why Isn't Pluto A Planet Anymore? | COLOSSAL QUESTIONS
-
08:46

are you okay? | Award-Winning Short Film About Bullying
-
18:24

Bathrooms, Boogers, and MORE! 7 Questions About Your Body Answered | COLOSSAL QUESTIONS
-
03:42

What Are The World's COOLEST Christmas Traditions? | COLOSSAL QUESTIONS
-
08:11

Comfort Food Origins: Mac and Cheese!
-
02:41

Why Are Feet So Stinky? | COLOSSAL QUESTIONS
-
05:43

What do these recycling numbers actually mean? - Shannon Odell
-
07:35

What Is Pain? | COLOSSAL QUESTIONS
-
11:26

Ancient Life as Old as the Universe
-
20:44

The Man Who Killed Millions and Saved Billions
-
05:09

3 tips on how to study effectively
-
02:23

What Are the 7 Wonders of the Ancient World? | COLOSSAL SONGS
-
29:45

I Built a Calculator in Survival Minecraft
-
04:57

What happens when you fall into piranha-infested waters? - Antonio Machado-Allison
-
04:38

Can you change your sleep schedule?
-

How Flying Scenes Are Shot For Movies And TV | Movies Insider | Insider
-
04:59

This library has every book ever published.
-
03:11

Why Do Giraffes Have Such Long Necks? | COLOSSAL QUESTIONS
-
06:05

This is what happens when you hit the gas - Shannon Odell
-
22:37

8 Mouth-Watering Questions About Food | COLOSSAL QUESTIONS
-
02:53

What Would Happen If You Never Pooped? | COLOSSAL QUESTIONS
-
05:19

Which is better for you: "Real" meat or "fake" meat? - Carolyn Beans
-
05:04

Whoever builds something here will be rich beyond measure - Fabio Pacucci
-
11:48

What Happens If You Destroy A Black Hole?
-
01:45

Watch 1000 Lego astronauts soar to the edge of space on 'mini space-shuttle'
-
11:09

How This Bizarre Virus Killed 500 Million People
-
03:04

Is The 5 Second Rule Real? | COLOSSAL QUESTIONS
-
05:48

Science vs. Pseudoscience - Siska De Baerdemaeker
-
03:13

What If You Never Cut Your Fingernails? | COLOSSAL QUESTIONS
-
05:25

Why did Megalodon go extinct? - Jack Cooper and Catalina Pimiento
-
03:58

What is a Hurricane? | COLOSSAL QUESTIONS
-
05:14

The battle that formed the universe - Fabio Pacucci
-
03:11

How Do You Eat in Space? | COLOSSAL QUESTIONS
-
11:15

The Black Hole That Kills Galaxies
-
05:27

What did people do before anesthesia? - Sally Frampton
-
05:06

Food expiration dates dont mean what you think - Carolyn Beans
-
02:20

Is This the Silliest Toy Ever?
-
03:34

Is It Called Soccer or Football? | COLOSSAL QUESTIONS
-
04:47

One In a Billion Moments In Nature
-
03:59

Can You Clone Yourself? | COLOSSAL QUESTIONS
-
09:14

Your Body Killed Cancer 5 Minutes Ago
-
11:12

The Best Way to Boost Your Immune System (With Science!)
-
04:11

How Honey Buns Are Made | Unwrapped 2.0 | Food Network
-
02:44

What Are Boogers? | COLOSSAL QUESTIONS
-
10:13

The WEIGHTLESS Machine
-
11:16

Why Aliens Might Already Be On Their Way To Us
-
05:03

How stretching actually changes your muscles - Malachy McHugh
-
09:35

This Slime Could Change The World | Planet Fix | BBC Earth Lab
-
09:53

I rode the world's fastest train.
-
04:44

What is a UFO? | COLOSSAL QUESTIONS
-
14:37

How People Make Ice Cream Around the World


















New Videos
-
21:13 New

kid always wears a mask
/ 24 views 24 Views / 0 Likeskid always wears a mask! Leave a like if you enjoyed and watch the lastest dhar mann video https://youtu.be/87Y3lGY9NXM Subscribe to SSSniperWolf to join the Wolf Pack http://bit.ly/SubSSSniperWolf Check out Dhar Mann https://www.youtube.com/c/DharMannOff
-
19:04 New

I Tried Rare And EXOTIC Fruit
/ 39 views 39 Views / 0 LikesI Tried Rare And EXOTIC Fruit! Today were trying out a little fast food hack to see if it works! Leave a Like if you enjoyed! Watch the last trying food video https://youtu.be/df5Z5MoKL1U Subscribe to SSSniperWolf to join the Wolf Pack http://bit.ly/SubSS
-
10:40 New

People Who Only Had One Job
/ 48 views 48 Views / 1 LikesPeople Who Only Had One Job! Have you ever failed at the one thing you had to do before? Leave a Like if you enjoyed! Watch the last vid https://youtu.be/liyLyB3c62M Subscribe to join the Wolf Pack and enable notifications! http://bit.ly/SubSSSniperWolfTi
-
11:36 New

I Mixed EVERY Fast Food Sauce
/ 37 views 37 Views / 0 LikesI Mixed EVERY Fast Food Sauce Together! Today were trying out a little fast food hack to see if it works! Leave a Like if you enjoyed! Watch the last food hacks video https://youtu.be/dtVq1MNYyEM Subscribe to SSSniperWolf to join the Wolf Pack http://bit.
-
28:14 New

Millionaire Finds Out CHILDHOOD LOVE Is HOMELESS, What Happens Next Is Shocking | Dhar Mann Studios
/ 34 views 34 Views / 0 LikesDon't forget to SUBSCRIBE to my channel by clicking here https://www.youtube.com/channel/UC_hK9fOxyy_TM8FJGXIyG8Q?sub_confirmation=1 Watch my favorite videos: https://www.youtube.com/playlist?list=PLnBCOhf_VBTVGGC7OryYH7wO87PCostB3Inspired By: A Country W
-
24:55 New

POPULAR GIRL Backstabs The NEW GIRL, What Happens Next Is Shocking | Dhar Mann Studios
/ 48 views 48 Views / 0 LikesDon't forget to SUBSCRIBE to my channel by clicking here https://www.youtube.com/channel/UC_hK9fOxyy_TM8FJGXIyG8Q?sub_confirmation=1 Watch my favorite videos: https://www.youtube.com/playlist?list=PLnBCOhf_VBTVGGC7OryYH7wO87PCostB3Inspired by CluelessREME
-
20:02 New

Best Friends' DOUBLE DATE Goes HORRIBLY WRONG, What Happens Is Shocking | Dhar Mann Studios
/ 38 views 38 Views / 0 LikesDon't forget to SUBSCRIBE to my channel by clicking here https://www.youtube.com/channel/UC_hK9fOxyy_TM8FJGXIyG8Q?sub_confirmation=1 Watch my favorite videos: https://www.youtube.com/playlist?list=PLnBCOhf_VBTVGGC7OryYH7wO87PCostB3REMEMBER - We're not jus
-
20:38 New

BLINDFOLDED MICRO HIDE N SEEK!
/ 14 views 14 Views / 0 LikesBLINDFOLDED MICRO HIDE N SEEK!GRAB SOME MERCH! https://www.jstushop.com INSTAGRAM:@ ItsJustinStuart@ AndrewScitesMain Channel - @JSTUSUBSCRIBE IF HIDE AND SEEK ! ------------------------------------------------------------------------------ Contact (Busin
-
28:27 New

Ultimate Homemade Scooter Build Battle!
/ 6 views 6 Views / 0 LikesUltimate Homemade Scooter Build Battle!GRAB SOME MERCH! https://www.jstushop.com INSTAGRAM:@ ItsJustinStuart@ AndrewScitesMain Channel - @JSTUSUBSCRIBE IF YOU LOVE SCOOTERS! ------------------------------------------------------------------------------ Co
-
28:30 New

We Built One Color Gaming Rooms!
/ 17 views 17 Views / 1 LikesWe Built One Color Gaming Rooms!GRAB SOME MERCH! https://www.jstushop.com INSTAGRAM:@ ItsJustinStuart@ AndrewScitesMain Channel - @JSTUSUBSCRIBE IF YOU LOVE ONE COLOR CHALLENGES! ----------------------------------------------------------------------------
-
29:45 New

We Built a HIDDEN Skatepark in Public!
/ 21 views 21 Views / 0 LikesWe Built a HIDDEN Skatepark in Public!GRAB SOME MERCH! https://www.jstushop.com INSTAGRAM:@ ItsJustinStuart@ AndrewScitesMain Channel - @JSTUSUBSCRIBE IF YOU LOVE SKATEBOARDING! -----------------------------------------------------------------------------
-
1:57:36 New

We Spent 500 Hours Playing Hide and Seek!
/ 8 views 8 Views / 0 LikesWe Spent 500 Hours Playing Hide and Seek!GRAB SOME MERCH! https://www.jstushop.com INSTAGRAM:@ ItsJustinStuart@ AndrewScitesMain Channel - @JSTUSUBSCRIBE IF YOU LOVE HIDE AND SEEK! --------------------------------------------------------------------------
-
30:35 New

We Had The Healthiest Day Ever
/ 12 views 12 Views / 0 LikesEXTREME 24 HOUR VIRAL HEALTH TRENDS CHALLENGE!GRAB SOME MERCH! https://www.jstushop.com INSTAGRAM:@ ItsJustinStuart@ AndrewScitesMain Channel - @JSTUSUBSCRIBE IF YOU LOVE BEING HEALTHY! ---------------------------------------------------------------------
-
23:33 New

EXTREME HIDE N SEEK IN AIRPORT!
/ 8 views 8 Views / 0 LikesEXTREME HIDE N SEEK IN AIRPORT!GRAB SOME MERCH! https://www.jstushop.com INSTAGRAM:@ ItsJustinStuart@ AndrewScitesMain Channel - @JSTUSUBSCRIBE IF HIDE N SEEK! ------------------------------------------------------------------------------ Contact (Busines
-
23:03 New

24 HOURS IN WINTER DESERT! *Solo Survival*
/ 7 views 7 Views / 0 Likes24 Hours in a Freezing Desert to survive solo!GRAB SOME MERCH! https://www.jstushop.com INSTAGRAM:@ ItsJustinStuart@ AndrewScitesMain Channel - @JSTUCome watch Isaac try to survive overnight in the freezing sand dunes! Will the winter storm be too much? S
-
24:26 New

Extreme Overnight Survival On Frozen Lake! *Solo Challenge*
/ 7 views 7 Views / 0 LikesExtreme Overnight Survival On Frozen Lake! *Solo Challenge*GRAB SOME MERCH! https://www.jstushop.com INSTAGRAM:@ ItsJustinStuart@ AndrewScitesMain Channel - @JSTUSUBSCRIBE IF YOU LOVE SOLO SURVIVAL CHALLENGES! ---------------------------------------------
-
33:53 New

We Tested 1-Star Rated Grocery Stores!
/ 10 views 10 Views / 0 LikesWe Tested 1-Star Rated Stores!GRAB SOME MERCH! https://www.jstushop.com INSTAGRAM:@ ItsJustinStuart@ AndrewScitesMain Channel - @JSTUSUBSCRIBE IF YOU LOVE JSTU REVIEWS! ------------------------------------------------------------------------------ Contact
-
30:51 New

$1 VS $100,000,000 LUXURY Gyms! (w/ Travis Hunter)
/ 6 views 6 Views / 0 Likes$1 VS $100,000,000 LUXURY GYMS!Special thanks to Travis Hunter for being in the video! GRAB SOME MERCH! https://www.jstushop.com INSTAGRAM:@ ItsJustinStuart@ AndrewScitesMain Channel - @JSTU-----------------------------------------------------------------
-
34:10 New

$100 VS $5,000 COFFEE SHOPS *Budget Challenge*
/ 5 views 5 Views / 0 Likes$100 VS $5,000 COFFEE SHOPS *Budget Challenge* GRAB SOME MERCH! https://www.jstushop.com INSTAGRAM:@ ItsJustinStuart@ AndrewScitesMain Channel - @JSTU**DESCRIPTION OF VIDEO**SUBSCRIBE IF ...... ! -----------------------------------------------------------
-
33:22 New

Ultimate Homemade Skateboard Build Battle!
/ 6 views 6 Views / 0 LikesUltimate Homemade Skateboard Build Battle!GRAB SOME MERCH! https://www.jstushop.com INSTAGRAM:@ ItsJustinStuart@ AndrewScitesMain Channel - @JSTUSUBSCRIBE IF YOU LOVE SKATEBOARDING! -------------------------------------------------------------------------
-
06:09 New

How to increase your happiness
/ 3 views 3 Views / 0 LikesDig into the benefits of practicing gratitude in your everyday life, and discover how being thankful can impact your happiness.--Many people would say the connection between happiness and gratefulness is very simple: when you are happy, you are grateful.
-
04:31 New

How do gas masks actually work? - George Zaidan
/ 10 views 10 Views / 0 LikesExplore the science behind how gas masks work, and how the technology protects us from airborne threats and pollutants.--You might think of gas masks as clunky military-looking devices. But in the near future, we may need to rely on these filters as part
-
06:09 New
How to increase your happiness
/ 4 views 4 Views / 0 LikesDig into the benefits of practicing gratitude in your everyday life, and discover how being thankful can impact your happiness.--Many people would say the connection between happiness and gratefulness is very simple: when you are happy, you are grateful.
-
04:31 New
How do gas masks actually work? - George Zaidan
/ 10 views 10 Views / 0 LikesExplore the science behind how gas masks work, and how the technology protects us from airborne threats and pollutants.--You might think of gas masks as clunky military-looking devices. But in the near future, we may need to rely on these filters as part
-
04:38 New

1 GIRL SINGS IN 13 LANGUAGES
/ 4 views 4 Views / 0 LikesSongs and artists: 1. Taylor Swift - Back To December 2. Tokio Hotel - Heilig 3. Paula Fernandes - Sensações 4. Hafdis Huld - Nóttin Læðist Inn 5. Vitaa & Slimane - Avant Toi 6. Cajsa-Stina Åkerström - Av L&au
-
01:39 New

Ida Linnea - Du Gamla, Du Fria (Sweden's National Anthem) Nyckelharpa
/ 3 views 3 Views / 0 LikesIda Linnea - Du Gamla, Du Fria (Sweden's National Anthem) Nyckelharpa
-
00:57 New

A card trick that always works - Reason Why!
/ 23 views 23 Views / 0 LikesThis card trick always works and the answer is explained here.
-
01:01 New

A card trick that always works. How to do it.
/ 14 views 14 Views / 0 LikesThis card trick always works. Watch the related why video for the answer to how it works.
-
01:01 New

The Oldest Camera Photograph
/ 24 views 24 Views / 1 Likes"View from the Window at Le Gras": the earliest-known (and perhaps first!) photograph taken with a camera #photography #history #Nicphore #Nipce #France #LaGras #pewter #bitumen #austin #austintx #utaustin #historyofphotography #reality #media #vsauce
-
14:22 New

THE FREAKIEST CREATURES! | Frog, Bear, Jellyfish AND MORE! | Nat Geo Kids Compilation | @natgeokids
/ 14 views 14 Views / 0 LikesDiscover the worlds craziest animals with this video series by National Geographic Kids. Listen in as Mother Nature explains why some creatures have some super-freaky traitslike see-through skin and super long tongues!00:00 Glass Frog - Ninja Frog Kicks B
-
10:38 New

Wackiest Places Around the World | 10 Minutes | Nat Geo Kids Compilation | @natgeokids
/ 30 views 30 Views / 0 LikesGet the inside scoop on the wackiest places on the planet in this video series.00:00 So Many Skulls!Enter at your own risk! In Catacombs of Paris you will find spooky skulls and bones buried beneath this citys streets.01:00 Elephant Six Stories High!Disco
-
13:26 New

Awesome 8 Animals | 13 Minutes | Nat Geo Kids Compilation | @natgeokids
/ 24 views 24 Views / 0 LikesGet the wildest, craziest, and coolest facts about animals in this show!00:00 Wildest Cats in the WorldGet ready for a purr-fect countdown of eight of the WILDEST, BIGGEST, and COOLEST cats in the world!01:45 Cutest Critters You'll Want to CuddleWatch as
-
24:36 New

Animal Showdown | 25 Minutes | Nat Geo Kids Compilation | @natgeokids
/ 10 views 10 Views / 0 LikesAnimals face-off in this surprising competition of the toughest, biggest, and baddest in the animal kingdom.00:00 Elephant vs. Ant: Battle for the StrongestElephant vs. Ant battle it out to see whos the STRONGEST. Who will win the heavyweight ELEPHANT or
-
22:11 New

Roller Coasters | Weird But True! | S1 E12 | Full Episode | Nat Geo Kids
/ 37 views 37 Views / 0 LikesWatch the full episode of Weird But True, Season 1 Episode 12, "Roller Coasters"! Charlie and Kirby are determined to tackle their weirdest fear: roller coasters! Charlie is on a mission to get over his motion sickness and Kirby is finally ready to conque
-
25:12 New

Fearless Adventures with Jack Randall | 25 Minutes | Nat Geo Kids Compilation | @natgeokids
/ 15 views 15 Views / 0 LikesJack does crazy things with wild animals to help protect and study them. Really crazy. And maybe dangerous. But Jack is a TRAINED EXPERT. DO NOT DO WHAT JACK DOES. Seriously. Approaching and handling wild animals can be dangerous. REALLY. Just dont do it!
-
20:38 New

Things You Wanna Know | 20 Minutes | Nat Geo Kids Compilation | @natgeokids
/ 17 views 17 Views / 0 LikesAre you in search for cool fun facts about our animals, dinosaurs, world, space, bugs, and much more? Then look no further! Here's a fun and exciting new series about some of the best topics ever! Learn basic facts, discover things you didn't know and fin
-
58:39 New

AMAZING ANIMALS! | 1 Hour | Nat Geo Kids Compilation | @natgeokids
/ 16 views 16 Views / 0 LikesWatch to discover interesting facts about animals from all over the world.00:00 Tree Kangaroo01:15 Blue Whale02:30 Frogfish03:45 Bottlenose Dolphin5:00 Red-Eyed Tree Frog6:15 Seahorse7:30 Black Rhino8:46 Polar Bear10:00 Beetle11:15 Gray Wolf12:31 Harpy Ea
-
22:11 New

Sharks! | Weird But True! | S1 E5 | Full Episode | @natgeokids
/ 17 views 17 Views / 0 LikesWatch the full episode of Weird But True, Season 1 Episode 5, "Sharks!" Did you know that sharks have seven senses? Or, that they dont have a single bone in their bodies?! Weird, but true! Kirby wants to get an up-close look at these mega-predators, but t
-
22:11 New

Survival 101 | Weird But True! | S1 E7 | Full Episode | @natgeokids
/ 11 views 11 Views / 0 LikesWatch the full episode of Weird But True, Season 1 Episode 7, "Survival 101"! Charlie and Kirby are off to Alaska to learn everything they can about human survival! The human body can go three weeks without food, but only three days without water! Weird,
-
18:59 New

Brain Magic Tricks and Mind Illusions | Nat Geo Kids Compilation | @natgeokids
/ 7 views 7 Views / 0 LikesFind out how to make things disappear in Brain Magic! Illusionist Eric Leclerc reveals real magic tricks and how different perspectives can play tricks on your mind. Your friends will scratch their heads and wonder how you did it when you try these tricks
-
13:14 New

What do animals think?! | Animal LOL | Nat Geo Kids Compilation | @natgeokids
/ 11 views 11 Views / 0 LikesWe dont really know what animals think, but "Animal LOL." makes a silly guess! 00:00 Fro-Zen MonkeysWatch these snow monkeys try to find some inner peace and quiet in this episode of "Animal LOL."01:09 Pool Party!Find out what these chatty elephants cant
-
39:53 New

Animal Jokes for Kids | Nat Geo Kids Compilation | @natgeokids
/ 9 views 9 Views / 0 LikesHow hard can you laugh? Find out on Just JokingLOL. Knock, knock. Whos there? Tank. Tank Who? Tanks for watching!00:00 Beary Funny01:04 Roar!02:58 Ghost Town04:38 Candy Crush06:11 Wave Action07:24 Under the Sea08:34 Sweet Tooth09:43 Chow Time10:56 Foodies
-
10:07 New

Rescuing Baby Animals! | Bandit Patrol | Nat Geo Kids Compilation | @natgeokids
/ 14 views 14 Views / 0 LikesGet an inside look at the adventures of animal experts with these WILD videos!0:00 Sophia On PatrolSophia has chores just like everyone elsebut sometimes that includes taking care of cute baby deer! Check out wild caregiving in this episode of "Bandit Pat
-
02:38 New

Behind the Scenes of Joel Sartore's Photo Ark Photography | Nat Geo Kids Compilation | @natgeokids
/ 10 views 10 Views / 0 LikesCheck out these behind-the-scenes videos from Joel Sartore's Photo Ark photography project.00:00 Behind the Scenes of Photo Ark: Blooper ReelWatch this hilarious blooper reel of photographer Joel Sartore taking photos of animals.0:01 Behind the Scenes of
-
05:36 New

Cute Animals vs Funny Animals | Nat Geo Kids Compilation | @natgeokids
/ 10 views 10 Views / 0 LikesAww! vs Eww!? Animals experience all sorts of moments in the wild. It's your call how you will react!00:00 Whoa! - Centipede Takes On Pocket MouseWatch what a centipede does to keep from becoming a pocket mouses snack! You wont believe what happens in thi
-
19:47 New

How Things Work | Submarines, 3D Printers, Popcorn & MORE | Nat Geo Kids Compilation | @NatGeoKids
/ 10 views 10 Views / 0 LikesKamri Noel and four of National Geographics experts find out how things work.00:00 How Submarines WorkKamri Noel asks marine biologist David Gruber to explain how submarines dive and navigate.02:19 How Gecko Feet WorkKamri Noel and National Geographics Da
-
44:06 New

Unlikely Animal Friends Full Episode | Love at First Sight | @natgeokids
/ 8 views 8 Views / 0 LikesWatch this full episode of Unlikely Animal Friends, "Love at First Sight"! A Hawaiian surfer brings his pet pig surfing. Experience the loving bond between a blind woman and her guide horse. An immobilized cat has an unlikely protector in a dachshund. Sub
-
03:21 New
Guess That Animal | Nat Geo Kids Compilation | What Am I | @natgeokids
/ 15 views 15 Views / 0 LikesBeat the clock and see if you can guess which animals are featured in the What Am I? video series! Jigsaw puzzle pieces and fun clues about each animal will help lead to the answer. This series features photos from Joel Sartores Photo Ark project, which d
-
06:26 New

I found this UNDERWATER Trash Can?! | Maddie Moate
/ 13 views 13 Views / 0 LikesI visited Falmouth Harbour, Cornwall, to learn about Seabins and their use worldwide to collect plastics from our oceans. #NationalMarineWeekTo buy my book, STUFF: https://www.maddiemoate.com/bookA massive thank you to Vicki and the team for showing me ar
-
09:37 New

Fish POO grew this DELICIOUS food!? | Maddie Moate
/ 16 views 16 Views / 0 LikesI visited BioAqua Farm in Somerset to learn more about Aquaponics, a fascinating closed-loop food production system that produces fish and food with very little human interaction.Buy my book, STUFF, to learn more about how people like Antonio use and reus
-
13:42 New

I threw a TEA PARTY for my BEES! | Beekeeping with Maddie
/ 9 views 9 Views / 0 LikesWelcome to the totally normal act of holding a coronation for a bee.My bees recently moved to the seaside, and with the coronation of King Charles on the horizon, it seemed only fitting I welcome my own Queen Bee into her Queendom with a proper celebratio
-
12:45 New

How are Easter Hot Cross Buns made? | Maddie Moate
/ 8 views 8 Views / 0 LikesCome along with me to Days Bakery in Ashwell as I learn how to make the iconic hot cross bun and uncover some interesting facts about their history. I even tried my hand at making these delicious Easter treats myself!Thank you to Nick, Bobbie and the team
-
08:15 New

How to install a package of honey bees! | Maddie Moate
/ 11 views 11 Views / 0 LikesIn June 2022 I had my first package of bees arrive in my own back garden! I've helped my mum look after bees for years (some of you have seen lots of our videos already) but this was the FIRST time I have ever had bees of my own. When I filmed this, the p
-
19:47 New

A Jungle Outside Your Front Door!! | Maddies Urban Jungles
/ 9 views 9 Views / 0 LikesYou might not believe it, but even in the largest cities around the world, amazing wildlife experiences are taking place. Sometimes, you just need to know where to look! Maddie Moate and her team of young local experts discover all kinds of Spring awakeni
-
06:47 New

The WEIRDEST Theme Park Trash Cans! | Maddie Moate
/ 8 views 8 Views / 0 LikesHave you seen my new book? It's available now https://www.maddiemoate.com/a-very-curious-christmasThe 'Holle Bolle Gijs' rubbish bins are one of *Efteling's most famous creations! There are currently 11 in the dutch theme park, so Greg and I went on a mis
-
07:02 New

Underwater Adventure! Can you spot the Octopus? | Maddie Moate
/ 13 views 13 Views / 0 LikesCome scuba diving with us in Sri Lanka as we go searching for animals living in the waters of Unawatuna! We see lots of reef fish, a sea turtle, an octopus and more! What can YOU see? Subscribe: http://bit.ly/1kPjJZLWatch Part Two! 'Underwater SHIPWRECK A
-
11:57 New

Why does this weird plant eat POO? | The Shrew Loo | Maddie Moate
/ 10 views 10 Views / 0 LikesHave you ever heard of the shrew loo? Ever since I discovered that Kew Gardens had one of these incredible plants, I've wanted to find out more. WHY would a plant evolve to eat poop? Watch to find out!A special thanks to Rob and all the staff at Kew (http
-
09:19 New

How is CARDBOARD made? | Maddie Moate
/ 9 views 9 Views / 1 LikesI visited Tri-Wall UK in Monmouth, Wales, to learn how they turn paper into cardboard (and cardboard into this BRILLIANT cardboard playhouse)More HOW ARE THEY MADE videos:How is MARBLES made? https://youtu.be/ePf-FFZZH3EHow is PAINT made? https://youtu.be
-
11:15 New

How is GLASS made? | Maddie Moate
/ 13 views 13 Views / 0 LikesI visited Pilkington glass factory in St Helen's to learn how float glass is made out of sand! Pilkington has been making glass since 1826, and their HUGE factory in the north of England is one of several making GLASS 24/7. Have you seen my new book? It's
-
10:24 New

How is PAINT Made? | Maddie Moate
/ 12 views 12 Views / 0 LikesI visited AkzoNobel to learn more about how paint is made. Their MASSIVE site in Ashington, UK, is designed to be the most advanced, most sustainable paint factory IN THE WORLD, and it was a fantastic experience spending the day with them as they showed m
-
10:22 New

How are MARBLES made? | Maddie Moate
/ 7 views 7 Views / 0 LikesLittle correction - "Cobolt" should be spelt "Cobalt" :-)I went to the House of Marbles in Newton Abbot to catch up with glass-maker Paul and learn how to make my own multi-coloured glass marble!Have you seen my new book? It's available now https://www.ma
-
04:32 New

Emperor penguin chicks jump off a 50-foot cliff in Antarctica NEVER-BEFORE-FILMED FOR TV | Nat Geo
/ 385 views 385 Views / 2 LikesNational Geographic and BAFTA Award-winning cinematographer Bertie Gregory release unprecedented footage of Emperor penguin chicks leaping 50 feet off an Antarctic cliff. The never-before-filmed behavior was for the 2025 installment of National Geographic
Featured -
11:47 New

How to Draw Furret | Pokemon
/ 15 views 15 Views / 0 LikesLearn How to Draw cute Furret from Pokemon. Easy step by step cartoon Pokemon character drawing tutorial. #drawsocutepokemon #furretpokemonPlease SUBSCRIBE at: https://www.youtube.com/channel/UC3dEvA1is6-0_yuei9iCdEw Hi Cuties and Welcome to my cute drawi
-
12:45 New

How to Draw PickyPiggy | Smiling Critters Pig
/ 21 views 21 Views / 0 LikesLearn How to Draw cute PickyPiggy the Pig from Smiling Critters Poppy Playtime. Easy step by step cartoon funny character drawing tutorial. #drawsocutesmilingcritters #smilingcritters Please SUBSCRIBE at: https://www.youtube.com/channel/UC3dEvA1is6-0_yuei
-
09:52 New

How to Draw a Polar Bear Easy
/ 34 views 34 Views / 0 LikesLearn How to Draw a cute Polar Bear. Simple, fun and Easy step by step cartoon kawaii Polar Bear drawing tutorial. #drawsocuteanimal #polarbear Please SUBSCRIBE at: https://www.youtube.com/channel/UC3dEvA1is6-0_yuei9iCdEw Hi Cuties and Welcome to my cute
-
10:53 New

How to Draw Crayon Shin-Chan
/ 19 views 19 Views / 0 LikesLearn How to Draw cute anime boy Crayon Shin Chan manga series. Easy step by step cartoon character drawing. #crayonshinchan Please SUBSCRIBE at: https://www.youtube.com/channel/UC3dEvA1is6-0_yuei9iCdEw Hi Cuties and Welcome to my cute drawing channel. I
-
10:23 New

How to Draw Pink Hearts Cat Aphmau Meemeows
/ 25 views 25 Views / 0 LikesLearn How to Draw cute Heart Cat from Aphmau Meemeows. Easy step by step cartoon Kitty Cat drawing. #drawsocutemeemeows #meemeows Please SUBSCRIBE at: https://www.youtube.com/channel/UC3dEvA1is6-0_yuei9iCdEw Hi Cuties and Welcome to my cute drawing channe
-
08:50 New

How to Draw Crocs with Charms
/ 31 views 31 Views / 0 LikesLearn How to Draw cute Crocs shoes with Jibbitz shoe charms. Easy step by step cartoon drawing tutorial. #crocs Please SUBSCRIBE at: https://www.youtube.com/channel/UC3dEvA1is6-0_yuei9iCdEw Hi Cuties and Welcome to my cute drawing channel. I hope to inspi
-
07:20 New

How to Draw the Wonder Flower | Super Mario Bros.
/ 23 views 23 Views / 0 LikesLearn How to Draw and Color the Wonder Flower from Super Mario Bros. Easy step by step cartoon Super Mario game character drawing. #drawsocutesupermario #wonderflowersupermarioPlease SUBSCRIBE at: https://www.youtube.com/channel/UC3dEvA1is6-0_yuei9iCdEw H
-
08:29 New
How to Draw Pudding Flan Dessert | Pusheen Food Art
/ 28 views 28 Views / 0 LikesLearn How to Draw a cute Pudeen Pusheen with a cherry on top. Easy step by step cartoon kawaii dessert drawing tutorial. #drawsocutepusheen #pusheen Please SUBSCRIBE at: https://www.youtube.com/channel/UC3dEvA1is6-0_yuei9iCdEw Hi Cuties and Welcome to my
-
13:14 New

How to Draw Goddess Aphmau Meemeow Cat
/ 23 views 23 Views / 0 LikesLearn How to Draw cute Aphmau's Ultra Rare Goddess Meemeow. Easy step by step cartoon kawaii Cat drawing tutorial. #drawsocutemeemeow #meemeows Please SUBSCRIBE at: https://www.youtube.com/channel/UC3dEvA1is6-0_yuei9iCdEw Hi Cuties and Welcome to my cute
-
15:25 New
How to Draw DogDay | Smiling Critters
/ 24 views 24 Views / 0 LikesLearn How to Draw DogDay, the canine leader from Smiling Critters in Poppy Playtime. Easy step by step cartoon character drawing tutorial. #drawsocutesmilingcritters #smilingcritters Please SUBSCRIBE at: https://www.youtube.com/channel/UC3dEvA1is6-0_yuei9
-
08:28 New

How to Draw Wooper | Pokemon
/ 15 views 15 Views / 0 LikesLearn How to Draw cute Axolotl Wooper from Pokemon. Easy step by step cartoon Pokemon character drawing tutorial. #drawsocutepokemon #wooper Please SUBSCRIBE at: https://www.youtube.com/channel/UC3dEvA1is6-0_yuei9iCdEw Hi Cuties and Welcome to my cute dra
-
16:12 New

How to Draw Miss Delight | Poppy Playtime
/ 21 views 21 Views / 0 LikesLearn How to Draw cute Miss Delight the doll teacher from Poppy Playtime. Easy step by step cartoon Poppy Playtime character drawing tutorial. #drawsocutepoppyplaytime #poppyplaytimePlease SUBSCRIBE at: https://www.youtube.com/channel/UC3dEvA1is6-0_yuei9i
-
12:24 New

How to Draw a Love Owl Holding a Heart
/ 17 views 17 Views / 0 LikesLearn How to Draw a cute cartoon Owl holding a heart card to celebrate LOVE. Perfect for Valentines, Mother's Day, Father's Day or any day to show your love. Easy step by step drawing tutorial. Please SUBSCRIBE at: https://www.youtube.com/channel/UC3dEvA1
-
08:45 New

How to Draw Shy Guy | Super Mario Bros.
/ 33 views 33 Views / 0 LikesLearn How to Draw cute Shy Guy from Super Mario Brothers Movie. Easy step by step cartoon Super Mario Bros. character drawing tutorial. #drawsocutesupermario #shyguysupermarioPlease SUBSCRIBE at: https://www.youtube.com/channel/UC3dEvA1is6-0_yuei9iCdEw Hi